欢迎大家赞助一杯啤酒🍺 我们准备了下酒菜:Formal mathematics/Isabelle/ML, Formal verification/Coq/ACL2, C++/F#/Lisp
ROS
来自开放百科 - 灰狐
(版本间的差异)
小 (→文档) |
小 (→文档) |
||
| 第51行: | 第51行: | ||
==文档== | ==文档== | ||
| − | |||
*[http://docs.huihoo.com/ros/roscon/2013/uROSnode-running-ROS-on-microcontrollers.pdf μROSnode – running ROS on microcontrollers] | *[http://docs.huihoo.com/ros/roscon/2013/uROSnode-running-ROS-on-microcontrollers.pdf μROSnode – running ROS on microcontrollers] | ||
*[http://docs.huihoo.com/ros/roscon/2014/next-generation-ros-building-on-dds.pdf Next-generation ROS: Building on DDS] | *[http://docs.huihoo.com/ros/roscon/2014/next-generation-ros-building-on-dds.pdf Next-generation ROS: Building on DDS] | ||
2016年6月8日 (三) 01:04的版本
| |
您可以在Wikipedia上了解到此条目的英文信息 ROS Thanks, Wikipedia. |
Robot operating system(ROS) 是一个构建机器人及应用的操作系统,采用 BSD 许可协议。
ROS 的主要目标是为机器人研究和开发提供代码复用的支持。
ROS 提供了 C++ 和 Python 两种主要的编程接口,提供了类似 Debian 的包管理系统,开发者能方便的开发、安装、管理应用包。
目录 |
新闻
- ROS Blog Retired (01 Jan 1970 00:00)
- Open Robotics accepted for Google Summer of Code 2019 (01 Jan 1970 00:00)
- ROSCon 2019: Call for Sponsors (01 Jan 1970 00:00)
- ROS 2 Crystal Clemmys Released (01 Jan 1970 00:00)
- ROSCon 2017: Reactive web interfaces with Polymer and ROS -- Justin Huang and Maya Cakmak (University of Washington) (01 Jan 1970 00:00)
- ROSCon Japan 2018 Successfully Concluded (01 Jan 1970 00:00)
- ROSCon 2017: rosnodejs -- Chris Smith (Rethink Robotics) (01 Jan 1970 00:00)
- ROSCon 2017: Model-based Design for Safety Critical Controller Design with ROS and Gazebo -- Michael Naderhirn, Mischa Köpf, and Josef Mendler (Kontrol GmbH) (01 Jan 1970 00:00)
- ROSCon 2017: Determinism in ROS - or when things break /sometimes / and how to fix it... -- Ingo Lütkebohle (Bosch Corporate Research) (01 Jan 1970 00:00)
- ROSCon 2017: ROS for Search and Rescue Robotics: Tools and Lessons learned during TRADR -- Martin Pecka (Czech Technical University in Prague) Sergio Caccamo (Kungliga Tekniska högskolan (KTH Stockholm))]Renaud Dube (ETH Zurich) Vladimír Kubelka (Czech T (01 Jan 1970 00:00)
ROS

版本
- ROS 2 ROS 2.0 Design
- ROS 2 @ GitHub
- ROS 1
- ROS core stacks @ GitHub
ROS发布了两个版本:
 ROS 集成 Arduino
ROS 集成 Arduino
ROS驱动

PR2

PR2玩桌球

Nao

Care-O-bot 3

Roomba





PR2
PR2 Robot System报价包括以下:
- Two arms + grippers
- Omnidirectional mobile base
- Sensor suite (mono-stereo with texture projector, wide field of view color stereo, 5MP camera, tilting LIDAR, base LIDAR, IMU, pan/tilt platform, forearm cameras, gripper tip sensors)
- 2 x onboard Xeon servers (each server: 8 cores i7, 24GB RAM, 2TB disk)
- Power system (onboard chargers, 1.3 kWh battery system)
- Full system EtherCAT motion control network
- Full system Gigabit Ethernet network with 32GB backplane switch
- Dual radio WiFi
- Wireless Run-Stop system
- Base station
$400,000.00 + Taxes and Shipping
文档
用户
图集
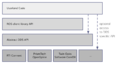
ROS on DDS

链接
- Robot operating system官网
- ROS背后的公司:Willow Garage
- PR2 Support
- 下载VirtualBox Appliance开始体验
- ROS Developer Conference
![]()
<discussion>characters_max=300</discussion>
分享您的观点