欢迎大家赞助一杯啤酒🍺 我们准备了下酒菜:Formal mathematics/Isabelle/ML, Formal verification/Coq/ACL2/Agda, C++/Lisp/Haskell
Simulation
来自开放百科 - 灰狐
(版本间的差异)
小 |
小 (→图集) |
||
| (未显示1个用户的2个中间版本) | |||
| 第9行: | 第9行: | ||
==项目== | ==项目== | ||
[[文件:Modelica-Association-logo.png|right|Modelica Association]] | [[文件:Modelica-Association-logo.png|right|Modelica Association]] | ||
| − | *[ | + | *[[Scilab]] |
| + | *[[Modelica]] | ||
*[https://www.robwork.dk/ RobWork] is a collection of C++ libraries for simulation and control of [[robot]] systems. | *[https://www.robwork.dk/ RobWork] is a collection of C++ libraries for simulation and control of [[robot]] systems. | ||
*[https://geant4.web.cern.ch/ Geant4 Simulation Toolkit] | *[https://geant4.web.cern.ch/ Geant4 Simulation Toolkit] | ||
*[https://www.computationalmodelbuilder.org/ Computational Model Builder (CMB)] [https://www.computationalmodelbuilder.org/smtk/ Simulation Modeling Toolkit] | *[https://www.computationalmodelbuilder.org/ Computational Model Builder (CMB)] [https://www.computationalmodelbuilder.org/smtk/ Simulation Modeling Toolkit] | ||
*[https://github.com/NetLogo NetLogo] | *[https://github.com/NetLogo NetLogo] | ||
| + | |||
| + | ==文档== | ||
| + | *[https://informs-sim.org/ Winter Simulation Conference Archive] | ||
==图集== | ==图集== | ||
2025年4月23日 (三) 05:58的最后版本
Simulation
目录 |
[编辑] 简介
[编辑] 功能
[编辑] 指南
[编辑] 项目
- Scilab
- Modelica
- RobWork is a collection of C++ libraries for simulation and control of robot systems.
- Geant4 Simulation Toolkit
- Computational Model Builder (CMB) Simulation Modeling Toolkit
- NetLogo
[编辑] 文档
[编辑] 图集

Modelica Association

CMB
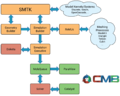
SMTK



[编辑] 链接
分享您的观点